註解擴散模型







在這篇部落格文章中,我們將深入探討**去噪擴散機率模型**(也稱為 DDPM、擴散模型、基於分數的生成模型或簡稱自編碼器),因為研究人員已透過它們在(有)條件影像/音訊/影片生成方面取得了卓越的成果。目前(撰寫本文時)流行的例子包括 OpenAI 的GLIDE和DALL-E 2,海德堡大學的Latent Diffusion和 Google Brain 的ImageGen。
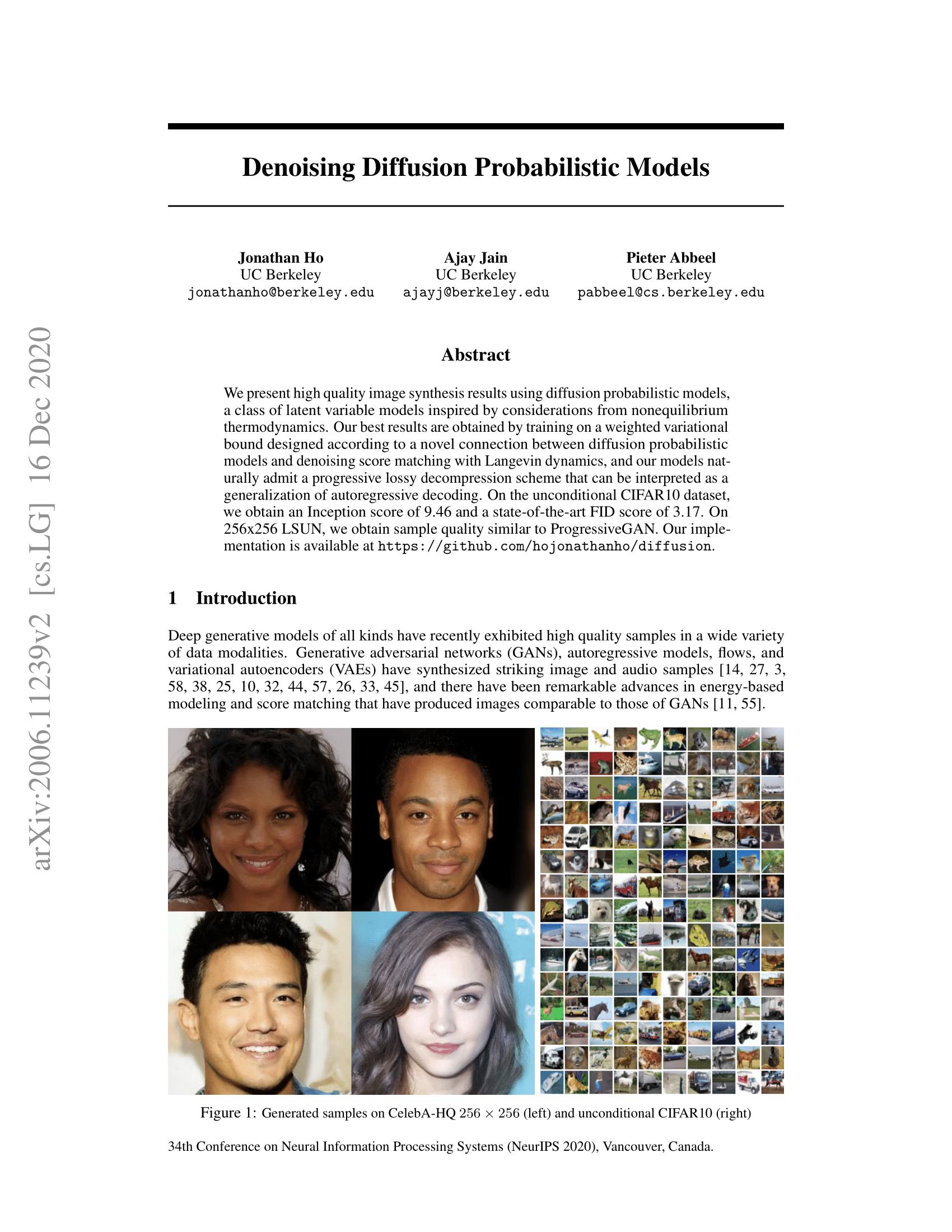
我們將回顧 (Ho 等人,2020) 的原始 DDPM 論文,並根據 Phil Wang 的實現(該實現本身基於原始 TensorFlow 實現)在 PyTorch 中逐步實現它。請注意,用於生成建模的擴散思想實際上在 (Sohl-Dickstein 等人,2015) 中已經提出。然而,直到 (Song 等人,2019)(斯坦福大學)和隨後的 (Ho 等人,2020)(Google Brain)獨立改進了該方法。
請注意,擴散模型有多種視角。這裡,我們採用離散時間(潛在變數模型)的視角,但請務必也檢視其他視角。
好的,讓我們開始吧!
from IPython.display import Image
Image(filename='assets/78_annotated-diffusion/ddpm_paper.png')
我們首先安裝並匯入所需的庫(假設您已安裝 PyTorch)。
!pip install -q -U einops datasets matplotlib tqdm
import math
from inspect import isfunction
from functools import partial
%matplotlib inline
import matplotlib.pyplot as plt
from tqdm.auto import tqdm
from einops import rearrange, reduce
from einops.layers.torch import Rearrange
import torch
from torch import nn, einsum
import torch.nn.functional as F
什麼是擴散模型?
去噪擴散模型與其他生成模型(如歸一化流、GAN 或 VAE)相比並不復雜:它們都將來自某個簡單分佈的噪聲轉換為資料樣本。這裡也是如此,**神經網路學習從純噪聲開始逐漸去噪資料**。
更具體地針對影像,該設定包含 2 個過程:
- 我們選擇的固定(或預定義)正向擴散過程 ,它逐漸向影像新增高斯噪聲,直到最終變為純噪聲
- 一個學習到的反向去噪擴散過程 ,其中訓練神經網路從純噪聲開始逐漸去噪影像,直到最終得到真實影像。

正向和反向過程都由 索引,在有限的時間步長 內進行(DDPM 作者使用 )。您從 開始,從資料分佈中取樣真實影像 (例如 ImageNet 中的貓影像),並且正向過程在每個時間步長 從高斯分佈中取樣一些噪聲,並將其新增到上一個時間步長的影像中。給定足夠大的 和在每個時間步長新增噪聲的良好排程,您最終將在 處透過漸進過程得到所謂的各向同性高斯分佈。
更數學化的形式
讓我們更正式地寫下來,因為最終我們需要一個可處理的損失函式,我們的神經網路需要對其進行最佳化。
令 為真實資料分佈,例如“真實影像”。我們可以從這個分佈中取樣得到影像,。我們定義正向擴散過程 ,它在每個時間步長 根據已知方差排程 新增高斯噪聲,如下所示:
回想一下,正態分佈(也稱為高斯分佈)由兩個引數定義:均值 和方差 。基本上,每個在時間步長 處的新(略微嘈雜的)影像都從**條件高斯分佈**中抽取,其均值為 ,方差為 ,我們可以透過取樣 ,然後設定 。
請注意, 在每個時間步長 並不恆定(因此帶有下標)——實際上,我們定義了一個所謂的**“方差排程”**,它可以是線性的、二次的、餘弦的等等,我們將在後面看到(有點像學習率排程)。
所以從 開始,我們最終得到 ,如果我們將排程設定得當,其中 是純高斯噪聲。
現在,如果知道條件分佈 ,那麼就可以反向執行該過程:透過取樣一些隨機高斯噪聲 ,然後逐漸“去噪”,最終得到從真實分佈 中取樣的樣本。
但是,我們不知道 。由於它需要知道所有可能影像的分佈才能計算這個條件機率,因此它是難以處理的。因此,我們將利用神經網路來**近似(學習)這個條件機率分佈**,我們稱之為 ,其中 是神經網路的引數,透過梯度下降更新。
好的,所以我們需要一個神經網路來表示反向過程的(條件)機率分佈。如果我們假設這個反向過程也是高斯分佈,那麼回想一下,任何高斯分佈都由兩個引數定義:
- 一個由 引數化的均值;
- 一個由 引數化的方差;
因此,我們可以將該過程引數化為 ,其中均值和方差也取決於噪聲水平 。
因此,我們的神經網路需要學習/表示均值和方差。然而,DDPM 作者決定**固定方差,並讓神經網路只學習(表示)這個條件機率分佈的均值 **。論文中提到:
首先,我們將 為未訓練的時間相關常數。實驗表明, 和 (見論文)取得了相似的結果。
這後來在改進擴散模型論文中得到了改進,除了均值之外,神經網路還學習這個反向過程的方差。
所以我們繼續,假設我們的神經網路只需要學習/表示這個條件機率分佈的均值。
定義目標函式(透過重新引數化均值)
為了推匯出學習反向過程均值的目標函式,作者觀察到 和 的組合可以看作是一個變分自編碼器(VAE)(Kingma 等人,2013)。因此,**變分下界**(也稱為 ELBO)可以用於最小化相對於真實資料樣本 的負對數似然(我們參考 VAE 論文了解 ELBO 的詳細資訊)。結果表明,這個過程的 ELBO 是每個時間步長 的損失之和,即 。透過構建正向 過程和反向過程,損失的每一項(除了 )實際上都是**兩個高斯分佈之間的 KL 散度**,它可以明確地寫成關於均值的 L2 損失!
正如 Sohl-Dickstein 等人所示,所構建的正向過程 的直接結果是,我們可以在任何任意噪聲水平下根據 取樣 (因為高斯分佈之和也是高斯分佈)。這非常方便:我們不需要重複應用 來取樣 。我們有
其中和。我們將此方程稱為“良好性質”。這意味著我們可以對高斯噪聲進行取樣並進行適當縮放,然後將其新增到以直接得到。請注意,是已知方差排程函式的函式,因此也是已知的,可以預先計算。這使得我們能夠在訓練期間最佳化損失函式的隨機項(換句話說,在訓練期間隨機取樣並最佳化)。
這個性質的另一個優點是,正如Ho等人所示,可以(經過一些數學推導,我們在此將讀者指向這篇優秀部落格文章)重新引數化均值,使神經網路學習(預測)新增的噪聲(透過網路)用於構成損失的KL項中的噪聲水平。這意味著我們的神經網路將成為噪聲預測器,而不是(直接的)均值預測器。均值可以計算如下:
最終的目標函式如下所示(對於給定的隨機時間步)
這裡,是初始(真實,未損壞的)影像,我們看到由固定正向過程給出的直接噪聲水平樣本。是在時間步取樣的純噪聲,而是我們的神經網路。神經網路透過真實噪聲和預測高斯噪聲之間的簡單均方誤差 (MSE) 進行最佳化。
訓練演算法現在看起來如下:

換句話說,
- 我們從真實的未知且可能複雜的資料分佈中隨機取樣一個樣本
- 我們從1到均勻取樣一個噪聲水平(即隨機時間步)
- 我們從高斯分佈中取樣一些噪聲,並使用該噪聲在水平處損壞輸入(使用上面定義的良好性質)
- 神經網路經過訓練,根據損壞的影像(即根據已知排程應用於的噪聲)來預測此噪聲
實際上,所有這些都是在資料批次上完成的,因為我們使用隨機梯度下降來最佳化神經網路。
神經網路
神經網路需要接受在特定時間步被加噪的影像,並返回預測的噪聲。請注意,預測的噪聲是一個與輸入影像具有相同大小/解析度的張量。所以從技術上講,網路輸入和輸出形狀相同的張量。我們可以為此使用哪種型別的神經網路呢?
這裡通常使用的是與自編碼器非常相似的架構,你可能在典型的“深度學習入門”教程中記得它。自編碼器在編碼器和解碼器之間有一個所謂的“瓶頸”層。編碼器首先將影像編碼為較小的隱藏表示,稱為“瓶頸”,然後解碼器將該隱藏表示解碼回實際影像。這迫使網路只在瓶頸層中保留最重要的資訊。
在架構方面,DDPM 作者選擇了 **U-Net**,由(Ronneberger 等人,2015)引入(當時在醫學影像分割領域取得了最先進的成果)。這個網路,像任何自編碼器一樣,中間包含一個瓶頸,確保網路只學習最重要的資訊。重要的是,它在編碼器和解碼器之間引入了殘差連線,極大地改善了梯度流(受 He 等人,2015 的 ResNet 啟發)。
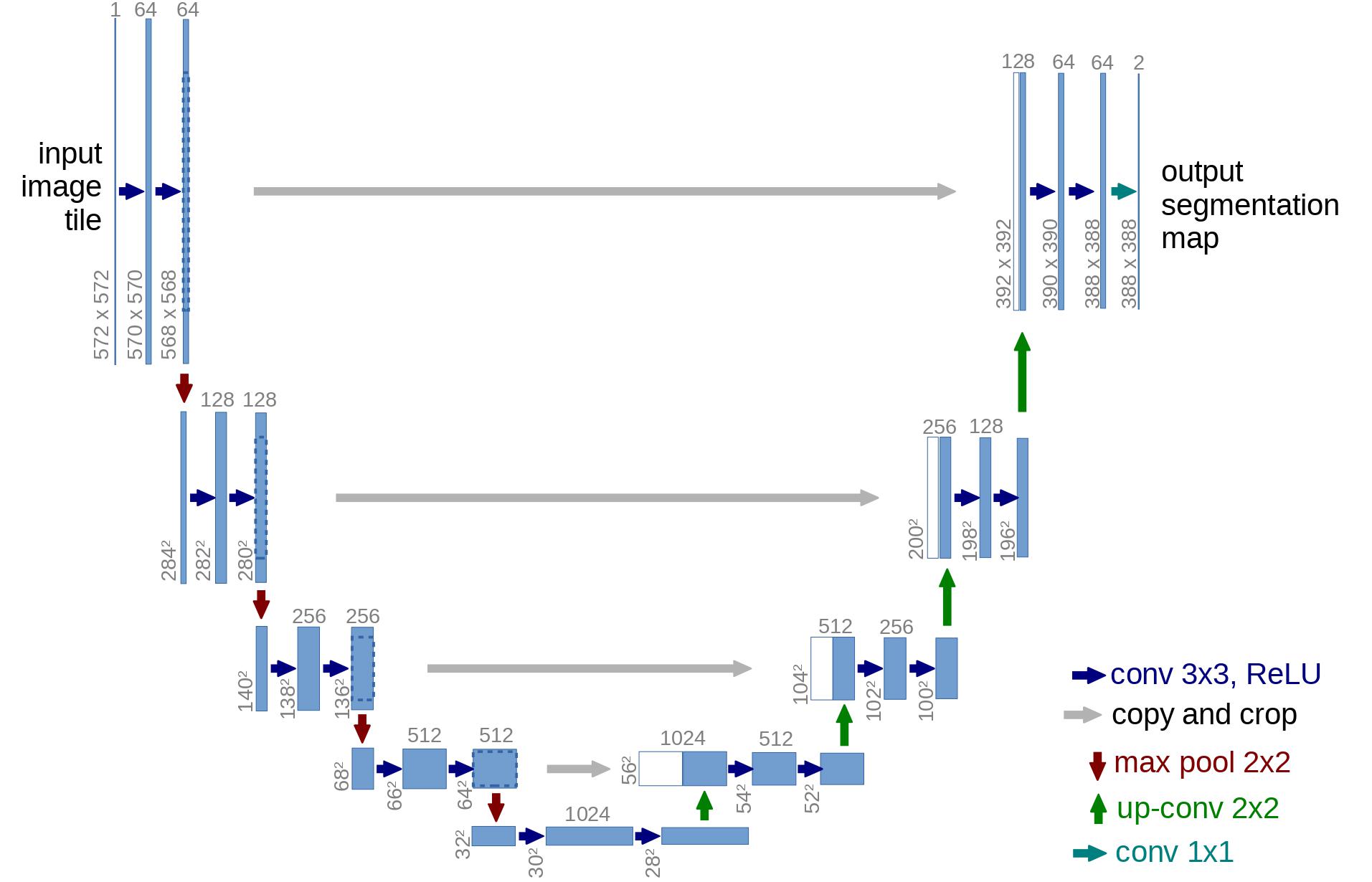
可以看出,U-Net 模型首先對輸入進行下采樣(即在空間解析度方面使輸入變小),然後執行上取樣。
下面,我們將逐步實現這個網路。
網路輔助函式
首先,我們定義一些輔助函式和類,它們將在實現神經網路時使用。重要的是,我們定義了一個`Residual`模組,它簡單地將輸入新增到特定函式的輸出中(換句話說,為特定函式添加了一個殘差連線)。
我們還為上取樣和下采樣操作定義了別名。
def exists(x):
return x is not None
def default(val, d):
if exists(val):
return val
return d() if isfunction(d) else d
def num_to_groups(num, divisor):
groups = num // divisor
remainder = num % divisor
arr = [divisor] * groups
if remainder > 0:
arr.append(remainder)
return arr
class Residual(nn.Module):
def __init__(self, fn):
super().__init__()
self.fn = fn
def forward(self, x, *args, **kwargs):
return self.fn(x, *args, **kwargs) + x
def Upsample(dim, dim_out=None):
return nn.Sequential(
nn.Upsample(scale_factor=2, mode="nearest"),
nn.Conv2d(dim, default(dim_out, dim), 3, padding=1),
)
def Downsample(dim, dim_out=None):
# No More Strided Convolutions or Pooling
return nn.Sequential(
Rearrange("b c (h p1) (w p2) -> b (c p1 p2) h w", p1=2, p2=2),
nn.Conv2d(dim * 4, default(dim_out, dim), 1),
)
位置嵌入
由於神經網路的引數在時間(噪聲水平)上是共享的,因此作者採用正弦位置嵌入來編碼,這受到了Transformer(Vaswani et al., 2017)的啟發。這使得神經網路“知道”它在批處理中的每個影像都在哪個特定時間步(噪聲水平)下執行。
SinusoidalPositionEmbeddings模組將形狀為`(batch_size, 1)`的張量作為輸入(即批處理中幾個嘈雜影像的噪聲水平),並將其轉換為形狀為`(batch_size, dim)`的張量,其中`dim`是位置嵌入的維度。然後將其新增到每個殘差塊中,我們將在後面看到。
class SinusoidalPositionEmbeddings(nn.Module):
def __init__(self, dim):
super().__init__()
self.dim = dim
def forward(self, time):
device = time.device
half_dim = self.dim // 2
embeddings = math.log(10000) / (half_dim - 1)
embeddings = torch.exp(torch.arange(half_dim, device=device) * -embeddings)
embeddings = time[:, None] * embeddings[None, :]
embeddings = torch.cat((embeddings.sin(), embeddings.cos()), dim=-1)
return embeddings
ResNet 塊
接下來,我們定義 U-Net 模型的核心構建塊。DDPM 作者採用了 Wide ResNet 塊(Zagoruyko 等人,2016),但 Phil Wang 將標準卷積層替換為“權重標準化”版本,這與組歸一化結合使用效果更好(詳見(Kolesnikov 等人,2019))。
class WeightStandardizedConv2d(nn.Conv2d):
"""
https://arxiv.org/abs/1903.10520
weight standardization purportedly works synergistically with group normalization
"""
def forward(self, x):
eps = 1e-5 if x.dtype == torch.float32 else 1e-3
weight = self.weight
mean = reduce(weight, "o ... -> o 1 1 1", "mean")
var = reduce(weight, "o ... -> o 1 1 1", partial(torch.var, unbiased=False))
normalized_weight = (weight - mean) * (var + eps).rsqrt()
return F.conv2d(
x,
normalized_weight,
self.bias,
self.stride,
self.padding,
self.dilation,
self.groups,
)
class Block(nn.Module):
def __init__(self, dim, dim_out, groups=8):
super().__init__()
self.proj = WeightStandardizedConv2d(dim, dim_out, 3, padding=1)
self.norm = nn.GroupNorm(groups, dim_out)
self.act = nn.SiLU()
def forward(self, x, scale_shift=None):
x = self.proj(x)
x = self.norm(x)
if exists(scale_shift):
scale, shift = scale_shift
x = x * (scale + 1) + shift
x = self.act(x)
return x
class ResnetBlock(nn.Module):
"""https://arxiv.org/abs/1512.03385"""
def __init__(self, dim, dim_out, *, time_emb_dim=None, groups=8):
super().__init__()
self.mlp = (
nn.Sequential(nn.SiLU(), nn.Linear(time_emb_dim, dim_out * 2))
if exists(time_emb_dim)
else None
)
self.block1 = Block(dim, dim_out, groups=groups)
self.block2 = Block(dim_out, dim_out, groups=groups)
self.res_conv = nn.Conv2d(dim, dim_out, 1) if dim != dim_out else nn.Identity()
def forward(self, x, time_emb=None):
scale_shift = None
if exists(self.mlp) and exists(time_emb):
time_emb = self.mlp(time_emb)
time_emb = rearrange(time_emb, "b c -> b c 1 1")
scale_shift = time_emb.chunk(2, dim=1)
h = self.block1(x, scale_shift=scale_shift)
h = self.block2(h)
return h + self.res_conv(x)
注意力模組
接下來,我們定義注意力模組,DDPM 的作者將其新增在卷積塊之間。注意力是著名的 Transformer 架構(Vaswani et al., 2017)的基本組成部分,該架構在 AI 的各個領域都取得了巨大成功,從自然語言處理和視覺到蛋白質摺疊。Phil Wang 採用了兩種注意力變體:一種是常規的多頭自注意力(如 Transformer 中使用的),另一種是線性注意力變體(Shen et al., 2018),其時間和記憶體需求隨序列長度線性縮放,而常規注意力是二次方縮放。
有關注意力機制的詳細解釋,請參閱 Jay Allamar 的精彩部落格文章。
class Attention(nn.Module):
def __init__(self, dim, heads=4, dim_head=32):
super().__init__()
self.scale = dim_head**-0.5
self.heads = heads
hidden_dim = dim_head * heads
self.to_qkv = nn.Conv2d(dim, hidden_dim * 3, 1, bias=False)
self.to_out = nn.Conv2d(hidden_dim, dim, 1)
def forward(self, x):
b, c, h, w = x.shape
qkv = self.to_qkv(x).chunk(3, dim=1)
q, k, v = map(
lambda t: rearrange(t, "b (h c) x y -> b h c (x y)", h=self.heads), qkv
)
q = q * self.scale
sim = einsum("b h d i, b h d j -> b h i j", q, k)
sim = sim - sim.amax(dim=-1, keepdim=True).detach()
attn = sim.softmax(dim=-1)
out = einsum("b h i j, b h d j -> b h i d", attn, v)
out = rearrange(out, "b h (x y) d -> b (h d) x y", x=h, y=w)
return self.to_out(out)
class LinearAttention(nn.Module):
def __init__(self, dim, heads=4, dim_head=32):
super().__init__()
self.scale = dim_head**-0.5
self.heads = heads
hidden_dim = dim_head * heads
self.to_qkv = nn.Conv2d(dim, hidden_dim * 3, 1, bias=False)
self.to_out = nn.Sequential(nn.Conv2d(hidden_dim, dim, 1),
nn.GroupNorm(1, dim))
def forward(self, x):
b, c, h, w = x.shape
qkv = self.to_qkv(x).chunk(3, dim=1)
q, k, v = map(
lambda t: rearrange(t, "b (h c) x y -> b h c (x y)", h=self.heads), qkv
)
q = q.softmax(dim=-2)
k = k.softmax(dim=-1)
q = q * self.scale
context = torch.einsum("b h d n, b h e n -> b h d e", k, v)
out = torch.einsum("b h d e, b h d n -> b h e n", context, q)
out = rearrange(out, "b h c (x y) -> b (h c) x y", h=self.heads, x=h, y=w)
return self.to_out(out)
組歸一化
DDPM 的作者將 U-Net 的卷積層/注意力層與組歸一化(Wu et al., 2018)交織在一起。下面,我們定義了一個 `PreNorm` 類,它將用於在注意力層之前應用組歸一化,我們將在後面看到。請注意,關於在 Transformer 中是在注意力之前還是之後應用歸一化,一直存在爭議。
class PreNorm(nn.Module):
def __init__(self, dim, fn):
super().__init__()
self.fn = fn
self.norm = nn.GroupNorm(1, dim)
def forward(self, x):
x = self.norm(x)
return self.fn(x)
條件 U-Net
現在我們已經定義了所有構建塊(位置嵌入、ResNet 塊、注意力和組歸一化),是時候定義整個神經網路了。回想一下,網路的工作是接收一批帶噪聲的影像及其各自的噪聲水平,並輸出新增到輸入中的噪聲。更正式地說:
- 網路接收一批形狀為`(batch_size, num_channels, height, width)`的噪聲影像和一批形狀為`(batch_size, 1)`的噪聲水平作為輸入,並返回形狀為`(batch_size, num_channels, height, width)`的張量
網路構建如下:
- 首先,對一批帶噪聲的影像應用卷積層,併為噪聲水平計算位置嵌入。
- 接下來,應用一系列下采樣階段。每個下采樣階段由2個ResNet塊+組歸一化+注意力+殘差連線+一個下采樣操作組成。
- 在網路的中間,再次應用ResNet塊,並穿插注意力。
- 接下來,應用一系列上取樣階段。每個上取樣階段由2個ResNet塊+組歸一化+注意力+殘差連線+一個上取樣操作組成。
- 最後,應用一個ResNet塊,然後是一個卷積層。
最終,神經網路就像樂高積木一樣堆疊層(但理解它們的工作原理很重要)。
class Unet(nn.Module):
def __init__(
self,
dim,
init_dim=None,
out_dim=None,
dim_mults=(1, 2, 4, 8),
channels=3,
self_condition=False,
resnet_block_groups=4,
):
super().__init__()
# determine dimensions
self.channels = channels
self.self_condition = self_condition
input_channels = channels * (2 if self_condition else 1)
init_dim = default(init_dim, dim)
self.init_conv = nn.Conv2d(input_channels, init_dim, 1, padding=0) # changed to 1 and 0 from 7,3
dims = [init_dim, *map(lambda m: dim * m, dim_mults)]
in_out = list(zip(dims[:-1], dims[1:]))
block_klass = partial(ResnetBlock, groups=resnet_block_groups)
# time embeddings
time_dim = dim * 4
self.time_mlp = nn.Sequential(
SinusoidalPositionEmbeddings(dim),
nn.Linear(dim, time_dim),
nn.GELU(),
nn.Linear(time_dim, time_dim),
)
# layers
self.downs = nn.ModuleList([])
self.ups = nn.ModuleList([])
num_resolutions = len(in_out)
for ind, (dim_in, dim_out) in enumerate(in_out):
is_last = ind >= (num_resolutions - 1)
self.downs.append(
nn.ModuleList(
[
block_klass(dim_in, dim_in, time_emb_dim=time_dim),
block_klass(dim_in, dim_in, time_emb_dim=time_dim),
Residual(PreNorm(dim_in, LinearAttention(dim_in))),
Downsample(dim_in, dim_out)
if not is_last
else nn.Conv2d(dim_in, dim_out, 3, padding=1),
]
)
)
mid_dim = dims[-1]
self.mid_block1 = block_klass(mid_dim, mid_dim, time_emb_dim=time_dim)
self.mid_attn = Residual(PreNorm(mid_dim, Attention(mid_dim)))
self.mid_block2 = block_klass(mid_dim, mid_dim, time_emb_dim=time_dim)
for ind, (dim_in, dim_out) in enumerate(reversed(in_out)):
is_last = ind == (len(in_out) - 1)
self.ups.append(
nn.ModuleList(
[
block_klass(dim_out + dim_in, dim_out, time_emb_dim=time_dim),
block_klass(dim_out + dim_in, dim_out, time_emb_dim=time_dim),
Residual(PreNorm(dim_out, LinearAttention(dim_out))),
Upsample(dim_out, dim_in)
if not is_last
else nn.Conv2d(dim_out, dim_in, 3, padding=1),
]
)
)
self.out_dim = default(out_dim, channels)
self.final_res_block = block_klass(dim * 2, dim, time_emb_dim=time_dim)
self.final_conv = nn.Conv2d(dim, self.out_dim, 1)
def forward(self, x, time, x_self_cond=None):
if self.self_condition:
x_self_cond = default(x_self_cond, lambda: torch.zeros_like(x))
x = torch.cat((x_self_cond, x), dim=1)
x = self.init_conv(x)
r = x.clone()
t = self.time_mlp(time)
h = []
for block1, block2, attn, downsample in self.downs:
x = block1(x, t)
h.append(x)
x = block2(x, t)
x = attn(x)
h.append(x)
x = downsample(x)
x = self.mid_block1(x, t)
x = self.mid_attn(x)
x = self.mid_block2(x, t)
for block1, block2, attn, upsample in self.ups:
x = torch.cat((x, h.pop()), dim=1)
x = block1(x, t)
x = torch.cat((x, h.pop()), dim=1)
x = block2(x, t)
x = attn(x)
x = upsample(x)
x = torch.cat((x, r), dim=1)
x = self.final_res_block(x, t)
return self.final_conv(x)
定義正向擴散過程
正向擴散過程在多個時間步中逐漸向真實分佈中的影像新增噪聲。這根據方差排程進行。最初的 DDPM 作者採用線性排程:
我們將正向過程方差設定為從線性增加到的常數。
然而,(Nichol et al., 2021) 的研究表明,採用餘弦排程可以取得更好的結果。
下面,我們定義了時間步的各種排程(我們稍後會選擇其中一個)。
def cosine_beta_schedule(timesteps, s=0.008):
"""
cosine schedule as proposed in https://arxiv.org/abs/2102.09672
"""
steps = timesteps + 1
x = torch.linspace(0, timesteps, steps)
alphas_cumprod = torch.cos(((x / timesteps) + s) / (1 + s) * torch.pi * 0.5) ** 2
alphas_cumprod = alphas_cumprod / alphas_cumprod[0]
betas = 1 - (alphas_cumprod[1:] / alphas_cumprod[:-1])
return torch.clip(betas, 0.0001, 0.9999)
def linear_beta_schedule(timesteps):
beta_start = 0.0001
beta_end = 0.02
return torch.linspace(beta_start, beta_end, timesteps)
def quadratic_beta_schedule(timesteps):
beta_start = 0.0001
beta_end = 0.02
return torch.linspace(beta_start**0.5, beta_end**0.5, timesteps) ** 2
def sigmoid_beta_schedule(timesteps):
beta_start = 0.0001
beta_end = 0.02
betas = torch.linspace(-6, 6, timesteps)
return torch.sigmoid(betas) * (beta_end - beta_start) + beta_start
首先,讓我們使用個時間步的線性排程,並定義我們將需要的來自的各種變數,例如方差的累積乘積。下面的每個變數都只是一個一維張量,儲存從到的值。重要的是,我們還定義了一個`extract`函式,它允許我們為一批索引提取適當的索引。
timesteps = 300
# define beta schedule
betas = linear_beta_schedule(timesteps=timesteps)
# define alphas
alphas = 1. - betas
alphas_cumprod = torch.cumprod(alphas, axis=0)
alphas_cumprod_prev = F.pad(alphas_cumprod[:-1], (1, 0), value=1.0)
sqrt_recip_alphas = torch.sqrt(1.0 / alphas)
# calculations for diffusion q(x_t | x_{t-1}) and others
sqrt_alphas_cumprod = torch.sqrt(alphas_cumprod)
sqrt_one_minus_alphas_cumprod = torch.sqrt(1. - alphas_cumprod)
# calculations for posterior q(x_{t-1} | x_t, x_0)
posterior_variance = betas * (1. - alphas_cumprod_prev) / (1. - alphas_cumprod)
def extract(a, t, x_shape):
batch_size = t.shape[0]
out = a.gather(-1, t.cpu())
return out.reshape(batch_size, *((1,) * (len(x_shape) - 1))).to(t.device)
我們將用貓的影像來說明在擴散過程的每個時間步如何新增噪聲。
from PIL import Image
import requests
url = 'http://images.cocodataset.org/val2017/000000039769.jpg'
image = Image.open(requests.get(url, stream=True).raw) # PIL image of shape HWC
image

噪聲被新增到 PyTorch 張量中,而不是 Pillow 影像中。我們首先定義影像轉換,允許我們從 PIL 影像轉換為 PyTorch 張量(我們可以在其上新增噪聲),反之亦然。
這些轉換相當簡單:我們首先將影像除以進行歸一化(使它們在範圍內),然後確保它們在範圍內。根據 DDPM 論文:
我們假設影像資料由中的整陣列成,併線性縮放到。這確保了神經網路逆向過程在從標準正態先驗開始時,以一致縮放的輸入進行操作。
from torchvision.transforms import Compose, ToTensor, Lambda, ToPILImage, CenterCrop, Resize
image_size = 128
transform = Compose([
Resize(image_size),
CenterCrop(image_size),
ToTensor(), # turn into torch Tensor of shape CHW, divide by 255
Lambda(lambda t: (t * 2) - 1),
])
x_start = transform(image).unsqueeze(0)
x_start.shape
Output:
----------------------------------------------------------------------------------------------------
torch.Size([1, 3, 128, 128])
我們還定義了反向轉換,它接受一個包含範圍內值的 PyTorch 張量,並將其轉換回 PIL 影像
import numpy as np
reverse_transform = Compose([
Lambda(lambda t: (t + 1) / 2),
Lambda(lambda t: t.permute(1, 2, 0)), # CHW to HWC
Lambda(lambda t: t * 255.),
Lambda(lambda t: t.numpy().astype(np.uint8)),
ToPILImage(),
])
讓我們驗證一下
reverse_transform(x_start.squeeze())

我們現在可以像論文中那樣定義正向擴散過程:
# forward diffusion (using the nice property)
def q_sample(x_start, t, noise=None):
if noise is None:
noise = torch.randn_like(x_start)
sqrt_alphas_cumprod_t = extract(sqrt_alphas_cumprod, t, x_start.shape)
sqrt_one_minus_alphas_cumprod_t = extract(
sqrt_one_minus_alphas_cumprod, t, x_start.shape
)
return sqrt_alphas_cumprod_t * x_start + sqrt_one_minus_alphas_cumprod_t * noise
讓我們在一個特定的時間步上測試它。
def get_noisy_image(x_start, t):
# add noise
x_noisy = q_sample(x_start, t=t)
# turn back into PIL image
noisy_image = reverse_transform(x_noisy.squeeze())
return noisy_image
# take time step
t = torch.tensor([40])
get_noisy_image(x_start, t)

讓我們在不同的時間步視覺化這一點。
import matplotlib.pyplot as plt
# use seed for reproducability
torch.manual_seed(0)
# source: https://pytorch.com.tw/vision/stable/auto_examples/plot_transforms.html#sphx-glr-auto-examples-plot-transforms-py
def plot(imgs, with_orig=False, row_title=None, **imshow_kwargs):
if not isinstance(imgs[0], list):
# Make a 2d grid even if there's just 1 row
imgs = [imgs]
num_rows = len(imgs)
num_cols = len(imgs[0]) + with_orig
fig, axs = plt.subplots(figsize=(200,200), nrows=num_rows, ncols=num_cols, squeeze=False)
for row_idx, row in enumerate(imgs):
row = [image] + row if with_orig else row
for col_idx, img in enumerate(row):
ax = axs[row_idx, col_idx]
ax.imshow(np.asarray(img), **imshow_kwargs)
ax.set(xticklabels=[], yticklabels=[], xticks=[], yticks=[])
if with_orig:
axs[0, 0].set(title='Original image')
axs[0, 0].title.set_size(8)
if row_title is not None:
for row_idx in range(num_rows):
axs[row_idx, 0].set(ylabel=row_title[row_idx])
plt.tight_layout()
plot([get_noisy_image(x_start, torch.tensor([t])) for t in [0, 50, 100, 150, 199]])

這意味著我們現在可以根據上面定義的模型定義損失函式:
def p_losses(denoise_model, x_start, t, noise=None, loss_type="l1"):
if noise is None:
noise = torch.randn_like(x_start)
x_noisy = q_sample(x_start=x_start, t=t, noise=noise)
predicted_noise = denoise_model(x_noisy, t)
if loss_type == 'l1':
loss = F.l1_loss(noise, predicted_noise)
elif loss_type == 'l2':
loss = F.mse_loss(noise, predicted_noise)
elif loss_type == "huber":
loss = F.smooth_l1_loss(noise, predicted_noise)
else:
raise NotImplementedError()
return loss
`denoise_model`將是上面定義的 U-Net。我們將使用真實噪聲和預測噪聲之間的 Huber 損失。
定義 PyTorch 資料集 + DataLoader
這裡我們定義一個普通的PyTorch 資料集。該資料集簡單地由真實資料集(如 Fashion-MNIST、CIFAR-10 或 ImageNet)中的影像組成,併線性縮放到。
每個影像都被調整為相同的大小。值得注意的是,影像也會隨機水平翻轉。根據論文:
我們在 CIFAR10 訓練期間使用了隨機水平翻轉;我們嘗試了帶翻轉和不帶翻轉的訓練,發現翻轉略微改善了樣本質量。
在這裡,我們使用 🤗 Datasets 庫,輕鬆地從中心載入 Fashion MNIST 資料集。該資料集包含已經具有相同解析度(即 28x28)的影像。
from datasets import load_dataset
# load dataset from the hub
dataset = load_dataset("fashion_mnist")
image_size = 28
channels = 1
batch_size = 128
接下來,我們定義一個函式,該函式將即時應用於整個資料集。我們為此使用了 `with_transform` 功能。該函式只應用了一些基本的影像預處理:隨機水平翻轉、重新縮放,最後使它們的值在範圍內。
from torchvision import transforms
from torch.utils.data import DataLoader
# define image transformations (e.g. using torchvision)
transform = Compose([
transforms.RandomHorizontalFlip(),
transforms.ToTensor(),
transforms.Lambda(lambda t: (t * 2) - 1)
])
# define function
def transforms(examples):
examples["pixel_values"] = [transform(image.convert("L")) for image in examples["image"]]
del examples["image"]
return examples
transformed_dataset = dataset.with_transform(transforms).remove_columns("label")
# create dataloader
dataloader = DataLoader(transformed_dataset["train"], batch_size=batch_size, shuffle=True)
batch = next(iter(dataloader))
print(batch.keys())
Output:
----------------------------------------------------------------------------------------------------
dict_keys(['pixel_values'])
取樣
由於我們將在訓練期間從模型中取樣(以跟蹤進度),因此我們在下面定義了相應的程式碼。論文中將取樣總結為演算法2
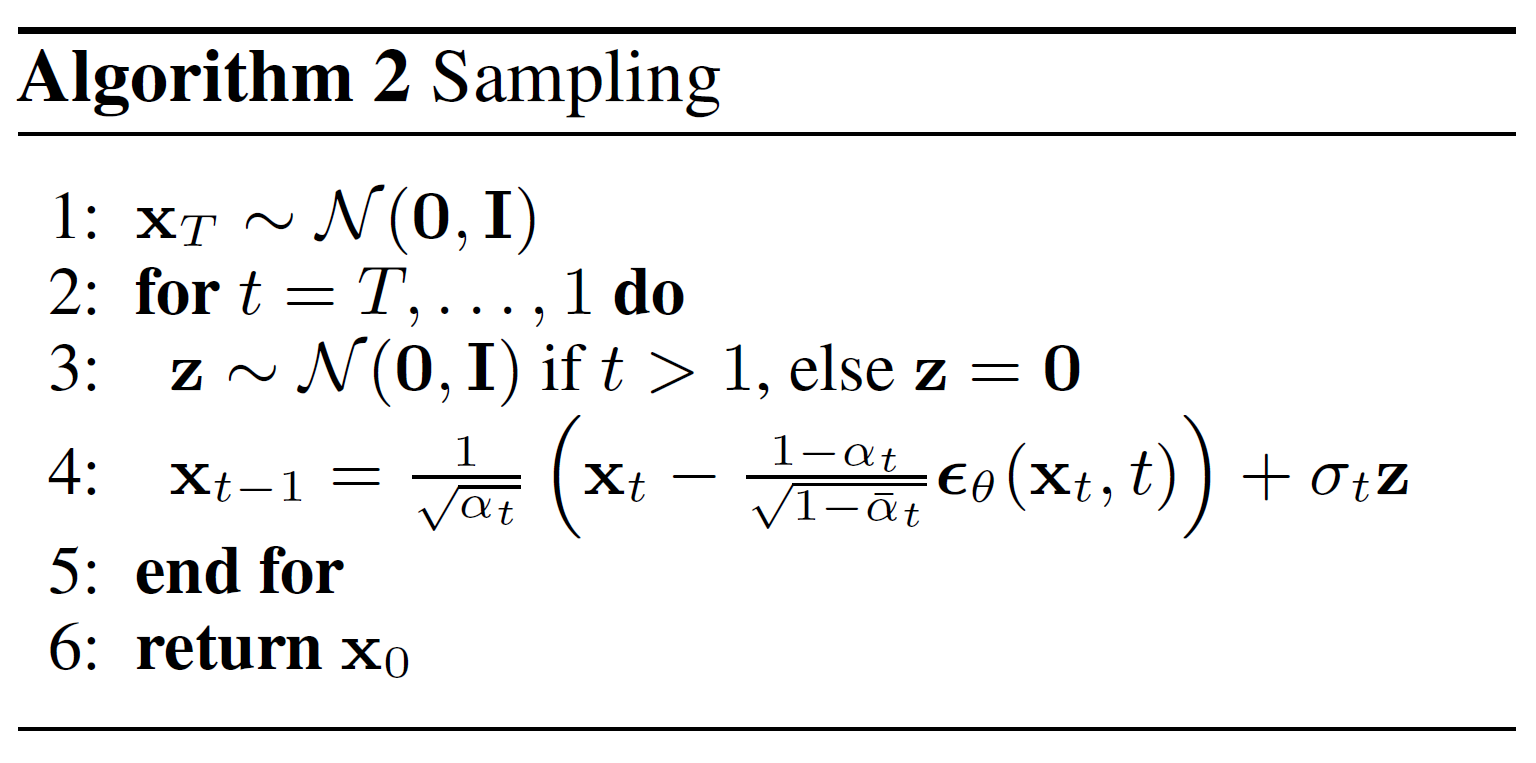
從擴散模型生成新影像是透過逆轉擴散過程來實現的:我們從開始,從高斯分佈中取樣純噪聲,然後使用我們的神經網路逐漸對其進行去噪(使用它學到的條件機率),直到我們到達時間步。如上所示,我們可以透過插入均值的重引數化,使用我們的噪聲預測器,推匯出稍微不那麼去噪的影像。請記住,方差是提前已知的。
理想情況下,我們最終得到的影像看起來像是來自真實資料分佈的。
下面的程式碼實現了這一點。
@torch.no_grad()
def p_sample(model, x, t, t_index):
betas_t = extract(betas, t, x.shape)
sqrt_one_minus_alphas_cumprod_t = extract(
sqrt_one_minus_alphas_cumprod, t, x.shape
)
sqrt_recip_alphas_t = extract(sqrt_recip_alphas, t, x.shape)
# Equation 11 in the paper
# Use our model (noise predictor) to predict the mean
model_mean = sqrt_recip_alphas_t * (
x - betas_t * model(x, t) / sqrt_one_minus_alphas_cumprod_t
)
if t_index == 0:
return model_mean
else:
posterior_variance_t = extract(posterior_variance, t, x.shape)
noise = torch.randn_like(x)
# Algorithm 2 line 4:
return model_mean + torch.sqrt(posterior_variance_t) * noise
# Algorithm 2 (including returning all images)
@torch.no_grad()
def p_sample_loop(model, shape):
device = next(model.parameters()).device
b = shape[0]
# start from pure noise (for each example in the batch)
img = torch.randn(shape, device=device)
imgs = []
for i in tqdm(reversed(range(0, timesteps)), desc='sampling loop time step', total=timesteps):
img = p_sample(model, img, torch.full((b,), i, device=device, dtype=torch.long), i)
imgs.append(img.cpu().numpy())
return imgs
@torch.no_grad()
def sample(model, image_size, batch_size=16, channels=3):
return p_sample_loop(model, shape=(batch_size, channels, image_size, image_size))
請注意,上面的程式碼是原始實現的簡化版本。我們發現我們的簡化(與論文中的演算法2一致)與原始、更復雜的實現一樣有效,後者採用了裁剪。
訓練模型
接下來,我們以常規 PyTorch 方式訓練模型。我們還定義了一些邏輯,用於使用上面定義的 `sample` 方法定期儲存生成的影像。
from pathlib import Path
def num_to_groups(num, divisor):
groups = num // divisor
remainder = num % divisor
arr = [divisor] * groups
if remainder > 0:
arr.append(remainder)
return arr
results_folder = Path("./results")
results_folder.mkdir(exist_ok = True)
save_and_sample_every = 1000
下面,我們定義模型,並將其移動到 GPU。我們還定義了一個標準最佳化器(Adam)。
from torch.optim import Adam
device = "cuda" if torch.cuda.is_available() else "cpu"
model = Unet(
dim=image_size,
channels=channels,
dim_mults=(1, 2, 4,)
)
model.to(device)
optimizer = Adam(model.parameters(), lr=1e-3)
我們開始訓練吧!
from torchvision.utils import save_image
epochs = 6
for epoch in range(epochs):
for step, batch in enumerate(dataloader):
optimizer.zero_grad()
batch_size = batch["pixel_values"].shape[0]
batch = batch["pixel_values"].to(device)
# Algorithm 1 line 3: sample t uniformally for every example in the batch
t = torch.randint(0, timesteps, (batch_size,), device=device).long()
loss = p_losses(model, batch, t, loss_type="huber")
if step % 100 == 0:
print("Loss:", loss.item())
loss.backward()
optimizer.step()
# save generated images
if step != 0 and step % save_and_sample_every == 0:
milestone = step // save_and_sample_every
batches = num_to_groups(4, batch_size)
all_images_list = list(map(lambda n: sample(model, batch_size=n, channels=channels), batches))
all_images = torch.cat(all_images_list, dim=0)
all_images = (all_images + 1) * 0.5
save_image(all_images, str(results_folder / f'sample-{milestone}.png'), nrow = 6)
Output:
----------------------------------------------------------------------------------------------------
Loss: 0.46477368474006653
Loss: 0.12143351882696152
Loss: 0.08106148988008499
Loss: 0.0801810547709465
Loss: 0.06122320517897606
Loss: 0.06310459971427917
Loss: 0.05681884288787842
Loss: 0.05729678273200989
Loss: 0.05497899278998375
Loss: 0.04439849033951759
Loss: 0.05415581166744232
Loss: 0.06020551547408104
Loss: 0.046830907464027405
Loss: 0.051029372960329056
Loss: 0.0478244312107563
Loss: 0.046767622232437134
Loss: 0.04305662214756012
Loss: 0.05216279625892639
Loss: 0.04748568311333656
Loss: 0.05107741802930832
Loss: 0.04588869959115982
Loss: 0.043014321476221085
Loss: 0.046371955424547195
Loss: 0.04952816292643547
Loss: 0.04472338408231735
取樣(推理)
要從模型中取樣,我們可以直接使用上面定義的取樣函式
# sample 64 images
samples = sample(model, image_size=image_size, batch_size=64, channels=channels)
# show a random one
random_index = 5
plt.imshow(samples[-1][random_index].reshape(image_size, image_size, channels), cmap="gray")
看起來模型能夠生成一件漂亮的 T 恤!請記住,我們訓練的資料集解析度相當低 (28x28)。
我們還可以建立去噪過程的 GIF
import matplotlib.animation as animation
random_index = 53
fig = plt.figure()
ims = []
for i in range(timesteps):
im = plt.imshow(samples[i][random_index].reshape(image_size, image_size, channels), cmap="gray", animated=True)
ims.append([im])
animate = animation.ArtistAnimation(fig, ims, interval=50, blit=True, repeat_delay=1000)
animate.save('diffusion.gif')
plt.show()

後續閱讀
請注意,DDPM 論文表明擴散模型是(無)條件影像生成的一個有前途的方向。此後,這一領域(極大地)得到了改進,尤其是在文字條件影像生成方面。下面,我們列出了一些重要的(但遠非詳盡的)後續工作
- 改進的去噪擴散機率模型 (Nichol 等人,2021):發現學習條件分佈的方差(除了均值)有助於提高效能
- 用於高保真影像生成的級聯擴散模型 (Ho 等人,2021):引入了級聯擴散,它包含多個擴散模型的管道,這些模型生成解析度不斷提高的影像,用於高保真影像合成
- 擴散模型在影像合成方面擊敗 GANs (Dhariwal 等人,2021):透過改進 U-Net 架構並引入分類器引導,表明擴散模型可以實現優於當前最先進生成模型的影像樣本質量
- 無分類器擴散引導 (Ho 等人,2021):透過使用單個神經網路聯合訓練條件和無條件擴散模型,表明您不需要分類器來引導擴散模型
- 使用 CLIP 潛在變數進行分層文字條件影像生成 (DALL-E 2) (Ramesh 等人,2022):使用先驗將文字描述轉換為 CLIP 影像嵌入,然後擴散模型將其解碼為影像
- 具有深度語言理解的光逼真文字到影像擴散模型 (ImageGen) (Saharia 等人,2022):表明將大型預訓練語言模型(例如 T5)與級聯擴散相結合在文字到影像合成方面效果很好
請注意,此列表僅包含截至撰寫本文時(2022 年 6 月 7 日)的重要作品。
目前,擴散模型的主要(也許是唯一)缺點似乎是它們需要多次前向傳播才能生成影像(GANs 等生成模型則不需要)。然而,正在進行的研究正在實現僅在 10 個去噪步驟中進行高保真生成。









